惯性导航 IMU :开启精准定位与导航的新篇章
在当今科技飞速发展的时代,惯性导航系统(INS)凭借其卓越的性能和广泛的应用领域,成为了现代导航技术的重要支柱。而其中的惯性测量单元(IMU),则是 INS 系统的核心组件,为各种应用提供了精准的位置、速度和姿态信息。
惯性导航 IMU 基于牛顿力学原理,通过测量物体的加速度和角速度,来推算出物体的运动状态。它由加速度计和陀螺仪组成,加速度计测量物体在三轴方向上的加速度,陀螺仪则测量物体的角速度。这些测量数据经过微处理器的处理和运算,能够实时地更新物体的位置、速度和姿态信息。
惯性导航 IMU 的优势在于其自主性和独立性。它不需要依赖外部的信号源,如卫星导航系统或无线电信号,因此能够在各种复杂的环境中工作,包括城市峡谷、森林、地下等。这使得惯性导航 IMU 在军事、航空航天、自动驾驶、机器人等领域具有不可替代的作用。
在军事领域,惯性导航 IMU 被广泛应用于导弹、飞机、舰艇等武器装备中,为其提供精确的导航和定位信息,提高武器的命中率和作战效能。在航空航天领域,惯性导航 IMU 则用于飞机的自动驾驶、导航和姿态控制,确保飞行的安全和稳定。在自动驾驶领域,惯性导航 IMU 与其他传感器如摄像头、雷达等相结合,为车辆提供实时的位置、速度和姿态信息,实现自动驾驶的高精度导航。
惯性导航 IMU 的发展也在不断推动着技术的进步。随着微机电系统(MEMS)技术的日益成熟,惯性导航 IMU 的尺寸、重量和成本都得到了显著降低,同时性能却得到了不断提升。MEMS 惯性导航 IMU 具有体积小、重量轻、功耗低等优点,能够集成到各种移动设备和物联网设备中,为人们的生活带来了更多的便利。
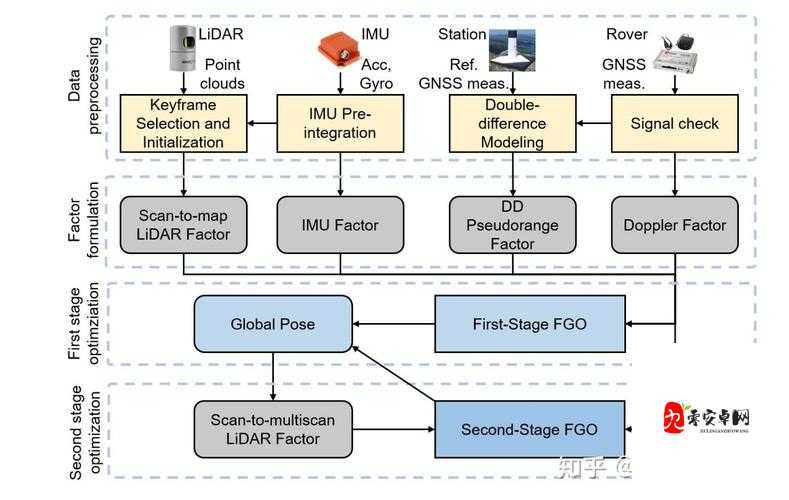
惯性导航 IMU 也在与其他导航技术如卫星导航、视觉导航等进行融合和互补。通过多传感器的数据融合,能够提高导航系统的精度、可靠性和鲁棒性。例如,惯性导航 IMU 与卫星导航系统的结合,可以在卫星信号受到干扰或遮挡时提供备份导航信息;而与视觉导航系统的融合,则可以利用环境中的图像信息来提高导航的准确性。
惯性导航 IMU 也并非完美无缺。它存在着累积误差的问题,随着时间的推移,误差会逐渐积累。为了减少误差的影响,通常需要定期进行校准和更新。惯性导航 IMU 对环境因素如温度、湿度等较为敏感,需要在设计和使用过程中加以考虑。
尽管存在一些挑战,惯性导航 IMU 凭借其独特的优势和不断的技术创新,将继续在导航领域发挥重要作用。随着人工智能、大数据和云计算等技术的发展,惯性导航 IMU 的性能和应用前景将更加广阔。
在未来,我们可以期待惯性导航 IMU 与更多的新兴技术融合,为人们带来更加智能、便捷和安全的导航体验。它将开启精准定位与导航的新篇章,为各个领域的发展注入新的动力。无论是在日常生活中还是在高端科技领域,惯性导航 IMU 都将继续展现其重要价值,为我们的生活和社会的进步做出贡献。